
Стартап RIF Robotics занимается разработкой роботизированной техники, которая сможет выполнять рутинные задачи в процессе уборки операционных палат — например, определять степень загрязненности хирургических инструментов и сортировать их по группам перед стерилизацией. В настоящее время проект проводит посевной раунд финансирования, в ходе которого планируется привлечь около 800 тысяч долларов.
Стартап был создан осенью 2020 года в штате Джорджия инженерами Кевином ДеМарко и Серхио Гарсия-Вергара вместе с промышленным дизайнером Коллином Фариллом. Идею подала тетя Кевина, работающая медсестрой в операционной: зная, что племянник работает в сфере робототехники, она как-то поделилась с ним мечтой о роботе, который мог бы помогать персоналу в уборке после хирургических операций. Изучив этот вопрос, ДеМарко решил создать проект вместе с коллегами из Технологического института Джорджии и попробовать разработать такого робота.
Основной этап стерильной очистки хирургических инструментов происходит в специальном устройстве, но перед этим они проходят предварительный этап осмотра и мануальной очистки, что требует больших затрат времени и сил у отвечающего за уборку персонала. Так, дезинфекция некоторых специфических инструментов может включать в себя более 100 поэтапных шагов, а в загруженные дни время на уборку может быть сильно ограничено. Кроме того, ошибки, допущенные при очистке, могут привести к необходимости утилизации инструментов и расходам на приобретение новых.
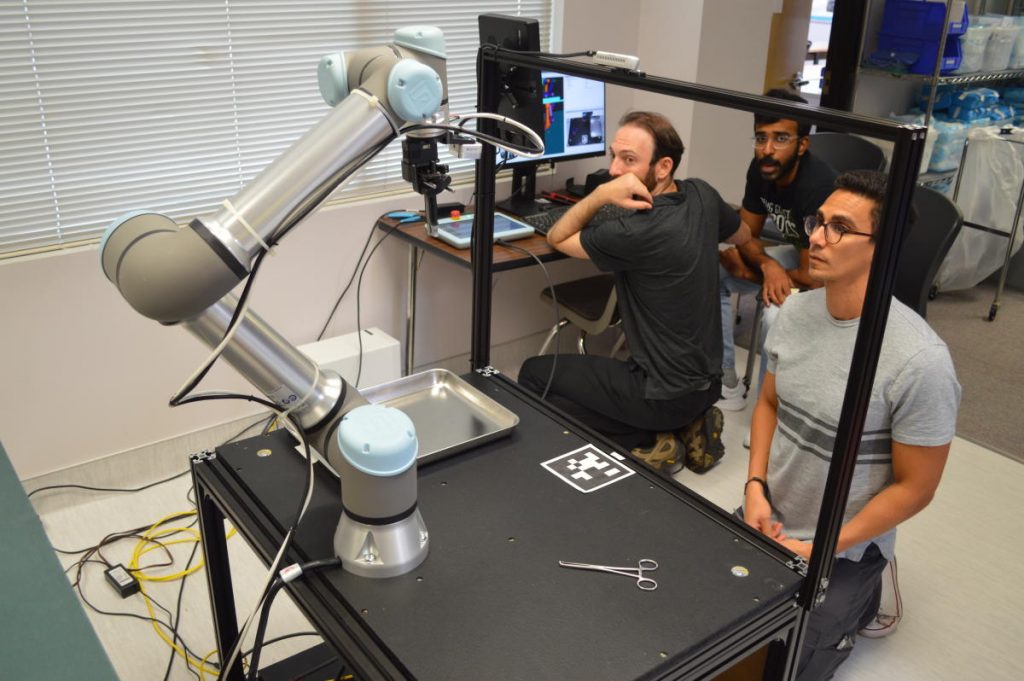
Стартап RIF решил подходить к задаче создания робота для уборки в операционных поэтапно. На данный момент компания создала прототип устройства по типу робота-манипулятора, который с помощью ИИ обучается идентифицировать и классифицировать хирургические инструменты вроде скальпелей, ножниц и пинцетов, а также распределять их по специальным лоткам. Две системы машинного обучения — система сегментации изображений и классификатор объектов, обученные на наборах как реальных, так и сгенерированных изображений хирургических инструментов — помогают манипулятору захватывать и перемещать инструменты.
На следующих этапах в планы компании входит разработка более усовершенствованных прототипов, которые смогут распознавать больше видов инструментов, определять, есть ли на их поверхностях какие-либо остаточные загрязнения после очистки, а также оценивать общее состояние и готовность инструментов к дальнейшему использованию (например, по параметру остроты).
По словам ДеМарко, к прототипу робота уже проявили интерес три больницы в Атланте (город в штате Джорджия). Кроме того, стартап оформил официальные документы, позволяющие проводить пилотные исследования своей разработки на некоторых медицинских объектах под наблюдением профессионалов.
После завершения посевного раунда финансирования RIF Robotics планирует нанять в свою команду экспертов по производству медицинского оборудования, а также развернуть три роботизированные системы в больницах Атланты для старта исследований. Стартап надеется, что переход от прототипа к запуску полноценного продукта произойдет к осени 2023 года.